
Research

$\color{Blue}{\textsf{Reservoir computing}}$
Reservoir computing (RC) is a type of recurrent neural networks (RNNs). It trains only the readout weights using linear regression, leaving the input weights and recurrent connection weights untrained. This approach gives RC a notable advantage over other RNNs, particularly in terms of rapid learning.
We have applied reservoir computing to tackle a range of challenges in nonlinear systems, including tracking control, magnetic navigation, AMOC prediction, and parameter tracking, among other applications.
Relevant Publications:
Zheng-Meng Zhai, Mohammadamin Moradi, Ling-Wei Kong, Bryan Glaz, Mulugeta Haile, and Ying-Cheng Lai. ''Model-free tracking control of complex dynamical trajectories with machine learning,'' Nature Communications, 14, 5968, 1-11 (2023).
Zheng-Meng Zhai, Mohammadamin Moradi, Ling-Wei Kong, and Ying-Cheng Lai. ''Detecting Weak Physical Signal from Noise: A Machine-Learning Approach with Applications to Magnetic-Anomaly-Guided Navigation,'' Physical Review Applied, 19, 034030, 1-18 (2023).
Zheng-Meng Zhai, Mohammadamin Moradi, Bryan Glaz, Mulugeta Haile, and Ying-Cheng Lai. ''Machine-learning parameter tracking with partial state observation,'' Physical Review Research, 6, 013196, 1-19 (2024).
Zheng-Meng Zhai, Mohammadamin Moradi, Shirin Panahi, Zhi-Hua Wang, and Ying-Cheng Lai. ''Machine-learning nowcasting of the Atlantic Meridional Overturning Circulation,'' APL Machine Learning, 2, 036103, 1-15 (2024).
Zheng-Meng Zhai, Benjamin D. Stern, and Ying-Cheng Lai. ''Bridging known and unknown dynamics by transformer-based machine-learning inference from sparse observations,'' Nature Communications, 16, 8053, 1-12 (2025).
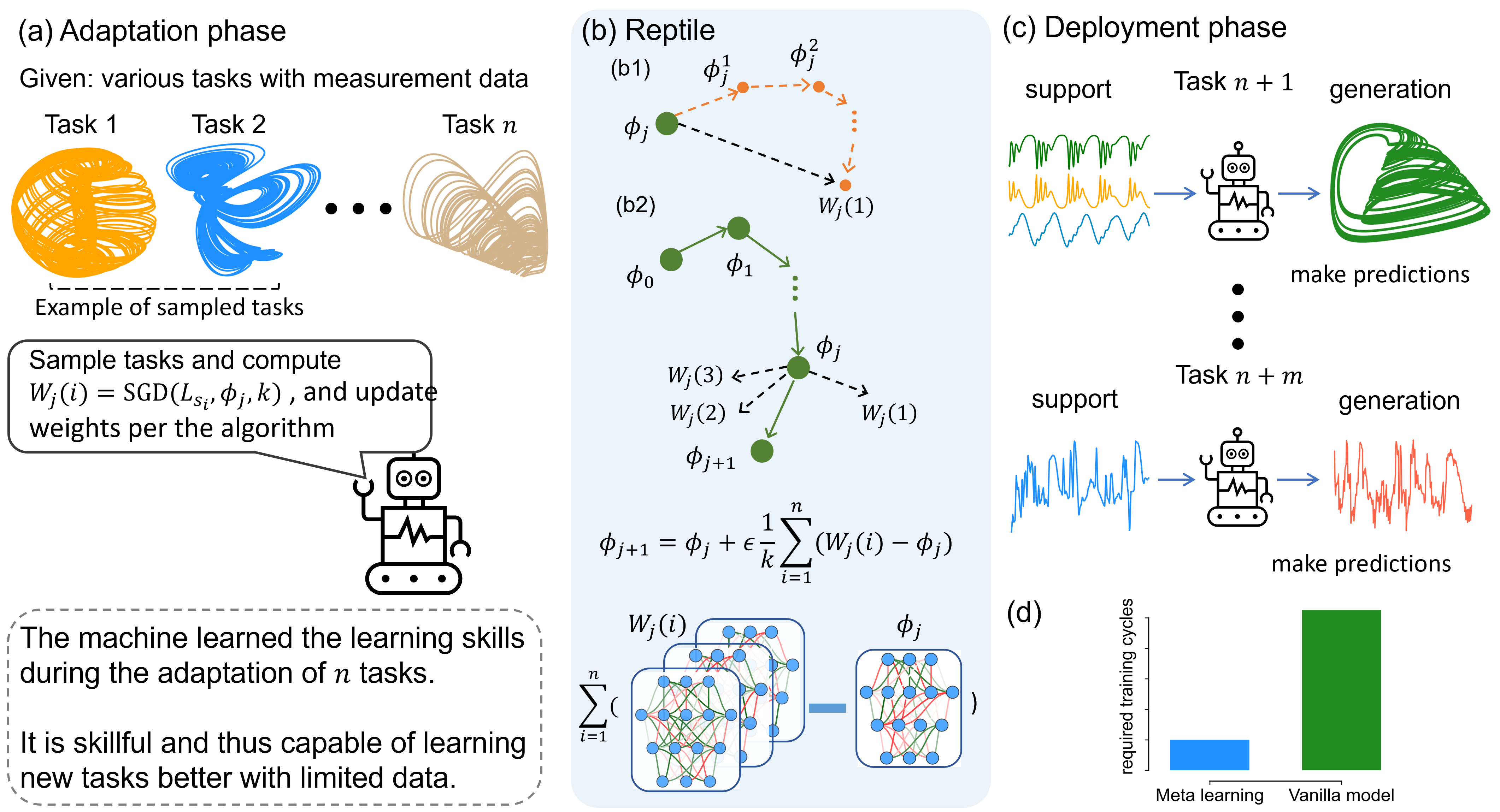
$\color{Blue}{\textsf{Meta-learning with dynamical systems}}$
How can reliable dynamics be learned when only very limited data are available?
We develop a meta-learning framework that leverages synthetic chaotic systems to “learn how to learn” complex dynamics. During the adaptation phase, the model gathers experience from diverse synthetic systems. In the deployment phase, it rapidly reconstructs the dynamical climate of new ecological systems using only limited data. Benchmark population models and real-world datasets in ecological are used to validate.
Relevant Publications:
Zheng-Meng Zhai, Bryan Glaz, Mulugeta Haile, Alan Hastings, and Ying-Cheng Lai. ''Learning to learn ecosystems from limited data,'' PNAS, 122, e2525347122, 1-9 (2025).
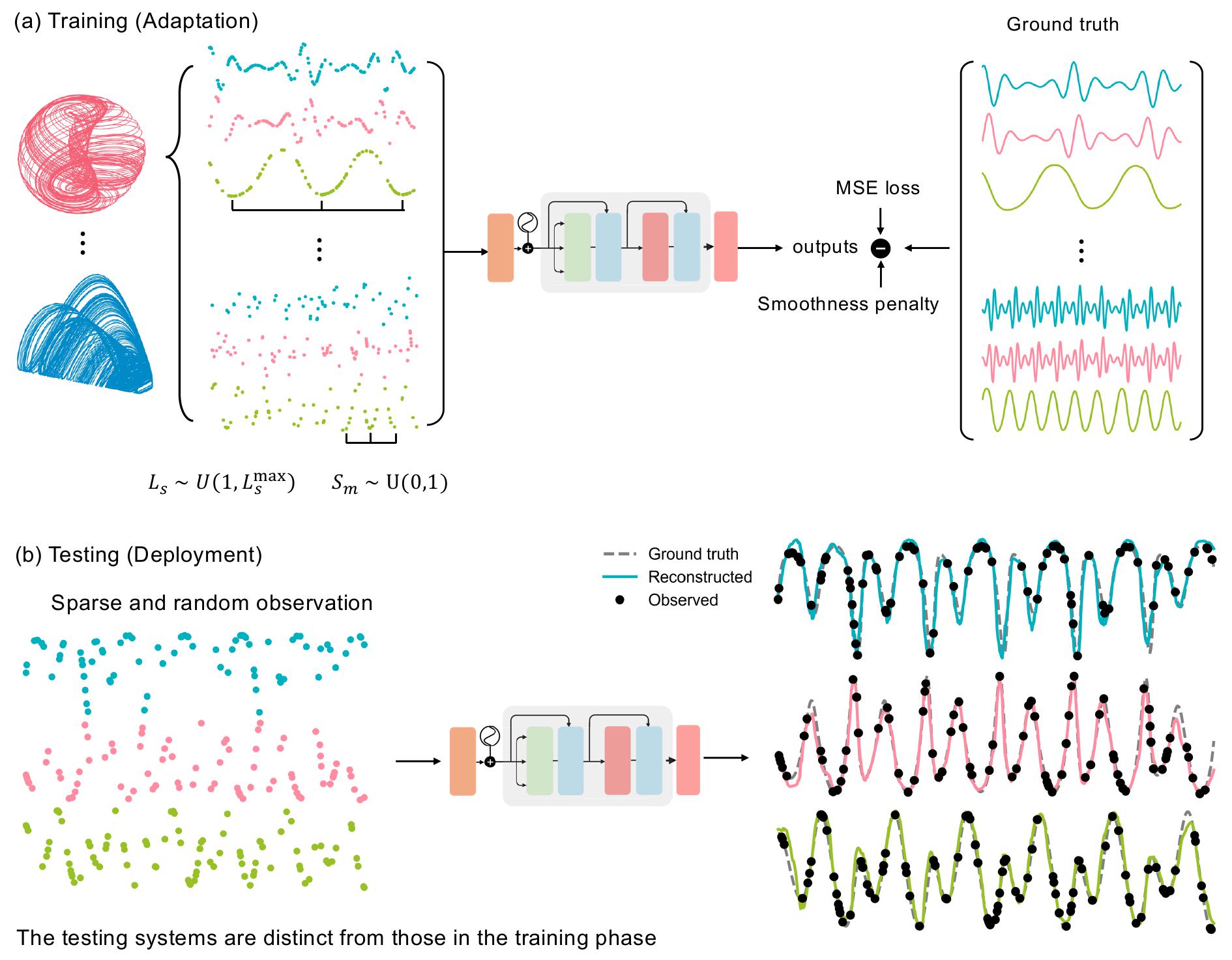
$\color{Blue}{\textsf{Zero-shot dynamics reconstruction}}$
Can the dynamics be faithfully reconstructed from the limited observations without any training data?
We develop a hybrid transformer and reservoir-computing machine-learning scheme. A number of known chaotic systems are used to train the transformer, during which the target systems are never exposed to it. In testing, the sparse data from the new unseen target system is provided to the well-trained transformer to recover its dynamics. In experiments on unseen target systems with high sparisty observations, the model can still reconstruct the dynamics.
Relevant Publications:
Zheng-Meng Zhai, Benjamin D. Stern, and Ying-Cheng Lai. ''Bridging known and unknown dynamics by transformer-based machine-learning inference from sparse observations,'' Nature Communications, 16, 8053, 1-12 (2025).
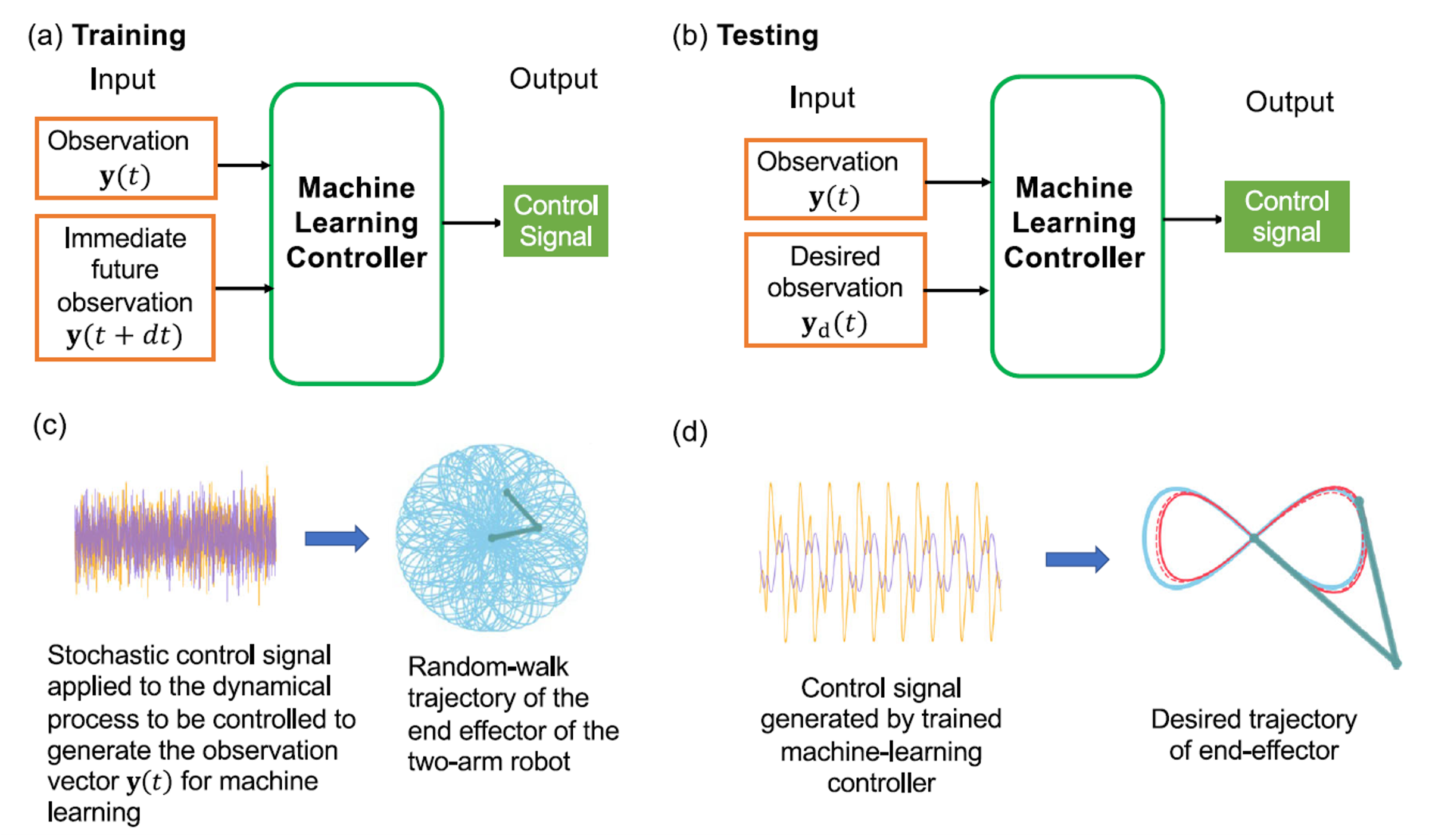
$\color{Blue}{\textsf{Tracking control with machine learning}}$
A model-free, machine-learning framework is developed to control a two-arm robotic manipulator using only partially observed states, where the controller is realized by reservoir computing.
Stochastic input is exploited for training. By so doing, the model trained on ‘‘random-walk’’ like signals is effective on tracking a variety of periodic and chaotic signals.
Relevant Publications:
Zheng-Meng Zhai, Mohammadamin Moradi, Ling-Wei Kong, Bryan Glaz, Mulugeta Haile, and Ying-Cheng Lai. ''Model-free tracking control of complex dynamical trajectories with machine learning,'' Nature Communications, 14, 5968, 1-11 (2023).
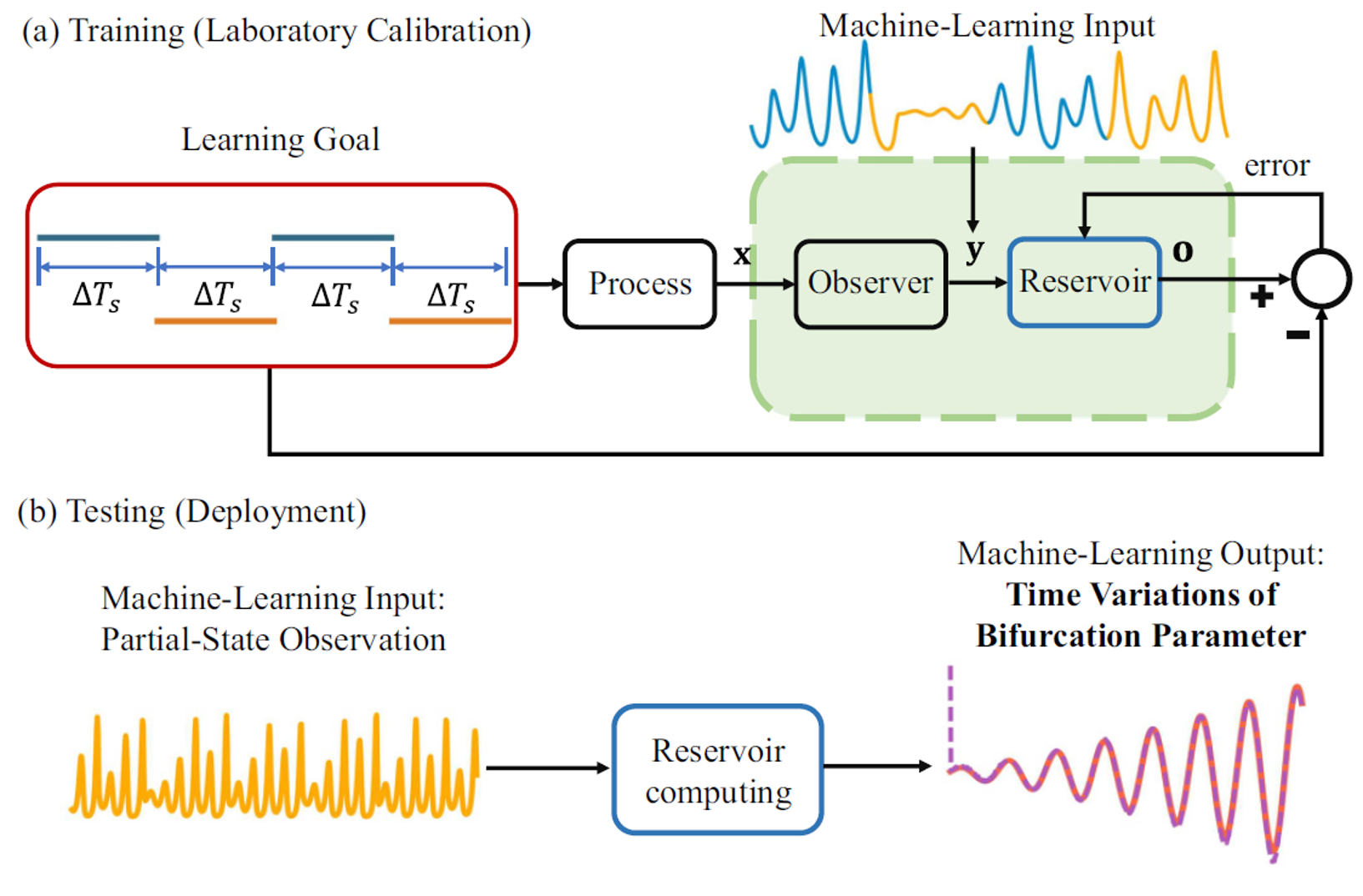
$\color{Blue}{\textsf{Inverse model meets machine learning}}$
Inverse modeling contrasts with direct modeling by working backwards from outcomes to infer unknown inputs or system characteristics.
we train a reservoir computer using constant parameters obtainable in a laboratory setting and their corresponding partial observations. During deployment, this reservoir computer tracks time-varying parameters using partial state observations, though the ground truth is no longer accessible. This idea is similarly applicable in nonlinear tracking control, where the input comprises both current and desired partial state observations, and the output generates the necessary control signals.
Relevant Publications:
Zheng-Meng Zhai, Mohammadamin Moradi, Bryan Glaz, Mulugeta Haile, and Ying-Cheng Lai. ''Machine-learning parameter tracking with partial state observation,'' Physical Review Research, 6, 013196, 1-19 (2024).
Zheng-Meng Zhai, Mohammadamin Moradi, Ling-Wei Kong, Bryan Glaz, Mulugeta Haile, and Ying-Cheng Lai. ''Model-free tracking control of complex dynamical trajectories with machine learning,'' Nature Communications, 14, 5968, 1-11 (2023).
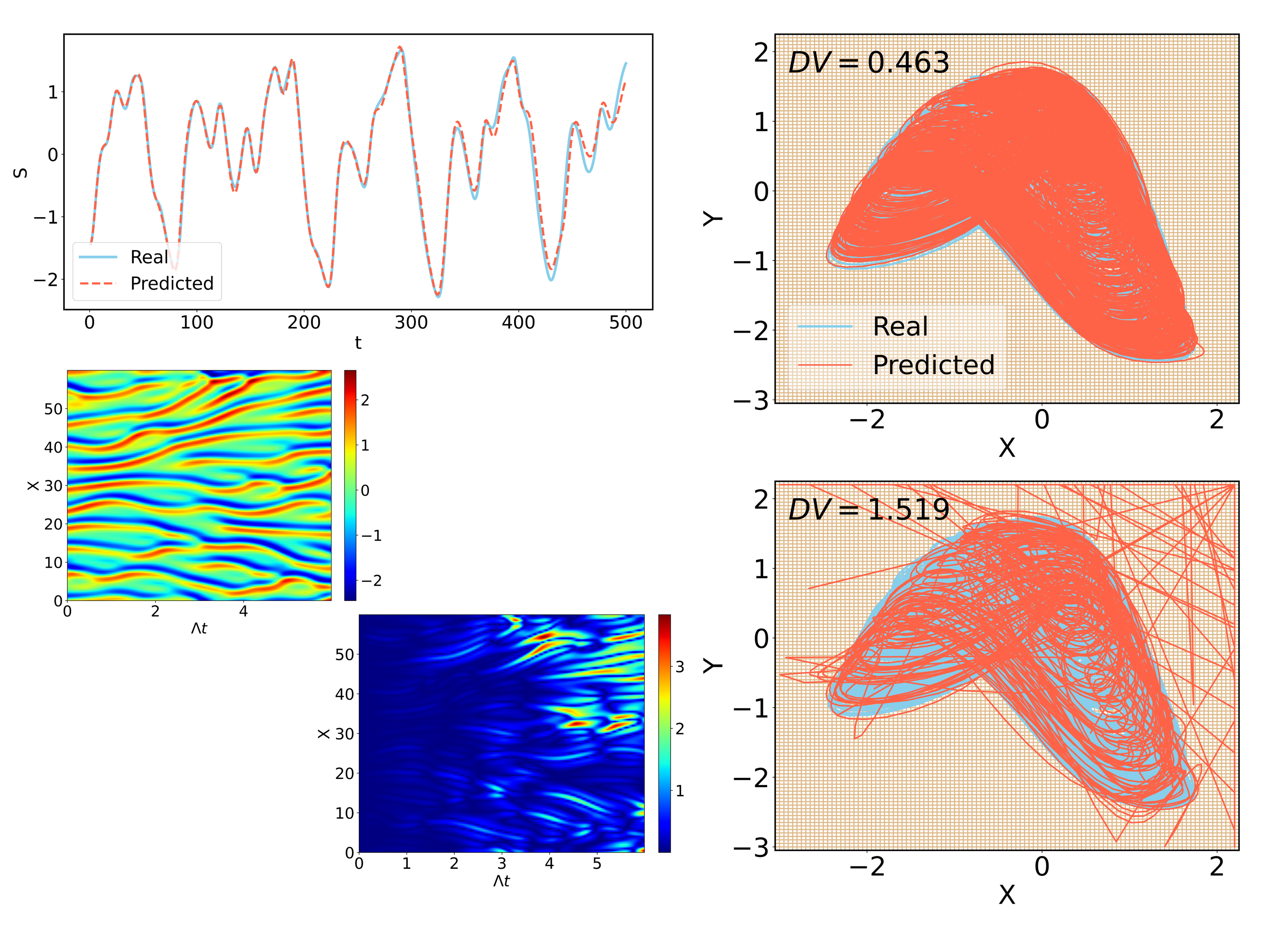
$\color{Blue}{\textsf{Chaotic systems short- and long-term prediction}}$
The chaotic systems can be predicted of the state variables in-short term and attractor reonstruction in long-term.
We have utilized reservoir computing to predict the behavior of chaotic systems, including the Lorenz, Mackey-Glass, and Kuramoto-Sivashinsky systems, and so on, over both short and long terms. Our studies reveal that introducing an optimal level of noise enhances performance, a phenomenon we describe as stochastic resonance.
Relevant Publications:
Zheng-Meng Zhai, Ling-Wei Kong, and Ying-Cheng Lai. ''Emergence of a resonance in machine learning,'' Physical Review Research, 5, 033127, 1-12 (2023).
Zheng-Meng Zhai, Benjamin D. Stern, and Ying-Cheng Lai. ''Bridging known and unknown dynamics by transformer-based machine-learning inference from sparse observations,'' Nature Communications, 16, 8053, 1-12 (2025).
Zheng-Meng Zhai, Bryan Glaz, Mulugeta Haile, Alan Hastings, and Ying-Cheng Lai. ''Learning to learn ecosystems from limited data,'' PNAS, 122, e2525347122, 1-9 (2025).